一、为什么会出现"实景孪生"这个概念?
近年来,"数字孪生"(Digital Twin)已成为智慧城市、工业互联网领域的热词。但在落地过程中,许多企业发现了一个共同痛点:传统数字孪生建设成本高、周期长、维护难——3D 建模耗时耗力,模型与现实场景长期不同步,最终变成"看起来炫酷、用起来没用"的可视化大屏。
正是在这一背景下,"实景孪生"(也称视频孪生)应运而生。它的核心思路是:不再依赖精细 3D 建模,而是将实时视频流与已有三维场景直接融合,让真实的监控画面成为三维空间的"皮肤",实现低成本、可维护的虚实联动可视化管控。
二、数字孪生 vs 实景孪生:核心差异对比
| 维度 | 传统数字孪生 | 实景孪生(视频孪生) |
|---|---|---|
| 核心输入 | 3D 建模数据(BIM/点云/CAD) | 实时视频流 + 轻量 3D 底座 |
| 建设成本 | 高(精细建模耗时数月) | 低(复用现有摄像头) |
| 真实感 | 依赖建模精度,易与现实脱节 | 视频即现实,天然保持同步 |
| 实时性 | 弱(模型更新滞后) | 强(视频流驱动,毫秒级同步) |
| 维护难度 | 高(场景变化需重新建模) | 低(摄像头自动更新现实画面) |
| 适用阶段 | 规划设计、仿真推演 | 运营监控、实时管控 |
| 典型场景 | 城市规划、工厂仿真、BIM 管理 | 智慧园区、港口、交通、船闸 |
一句话总结:传统数字孪生是"建出来的虚拟世界",实景孪生是"拍出来的真实世界与三维空间的实时叠合"。两者并不对立,而是面向不同阶段的互补技术路线。
三、什么是实景孪生(视频孪生)?
实景孪生,又称视频孪生,是将多路实时视频流与三维场景模型进行深度融合的技术。系统自动完成视频帧与三维空间的坐标对齐,将真实的监控画面"贴合"到对应的三维位置上,让操作人员既能看到真实的视频细节,又能获得三维空间的全局态势感知。
实景孪生的三个核心特征
- 实时性:视频驱动,三维场景与现实世界毫秒级同步,不依赖人工建模更新
- 低成本:复用现有监控摄像头,无需重新铺设硬件设施
- 虚实联动:在三维界面中点击任意区域,即可跳转查看对应位置的实时视频细节
四、视频与三维融合的技术原理
4.1 坐标系对齐(Video-3D Registration)
系统根据摄像头的物理位置、焦距、朝向参数,将视频帧坐标与三维场景坐标系对齐。这一步决定了视频画面能否准确"落"在三维空间的正确位置上——偏差过大会导致人、车、建筑在三维场景中位置漂移,失去实用价值。
4.2 视频投影与融合渲染
对齐后,系统将视频帧投影到三维模型的对应表面,完成实时渲染输出。SuperMetaX 支持 Unreal Engine、Unity、Cesium、Three.js 等主流三维引擎,也提供自研融合引擎,满足不同技术栈的集成需求。
| 融合引擎 | 适用场景 | 特点 |
|---|---|---|
| Unreal Engine | 高精度工厂、园区孪生 | 画质最佳,对硬件要求高 |
| Unity | 工业可视化、轻量部署 | 跨平台强,开发生态丰富 |
| Cesium | 城市级、地理信息场景 | 天然支持 GIS 数据,适合大范围场景 |
| Three.js | 浏览器端轻量展示 | 无需安装客户端,B/S 架构友好 |
| SuperMetaX 自研引擎 | 视频流密集的工业场景 | 针对多路视频融合优化,延迟最低 |
4.3 虚实联动交互
融合完成后,三维场景成为可交互的实时监控界面——点击三维地图上的摄像头图标可弹出实时视频窗口;告警事件在三维空间中精准定位并高亮;历史轨迹、统计数据叠加到真实场景位置,实现"在哪里看、就在哪里管"的操作体验。
五、实景孪生典型应用场景
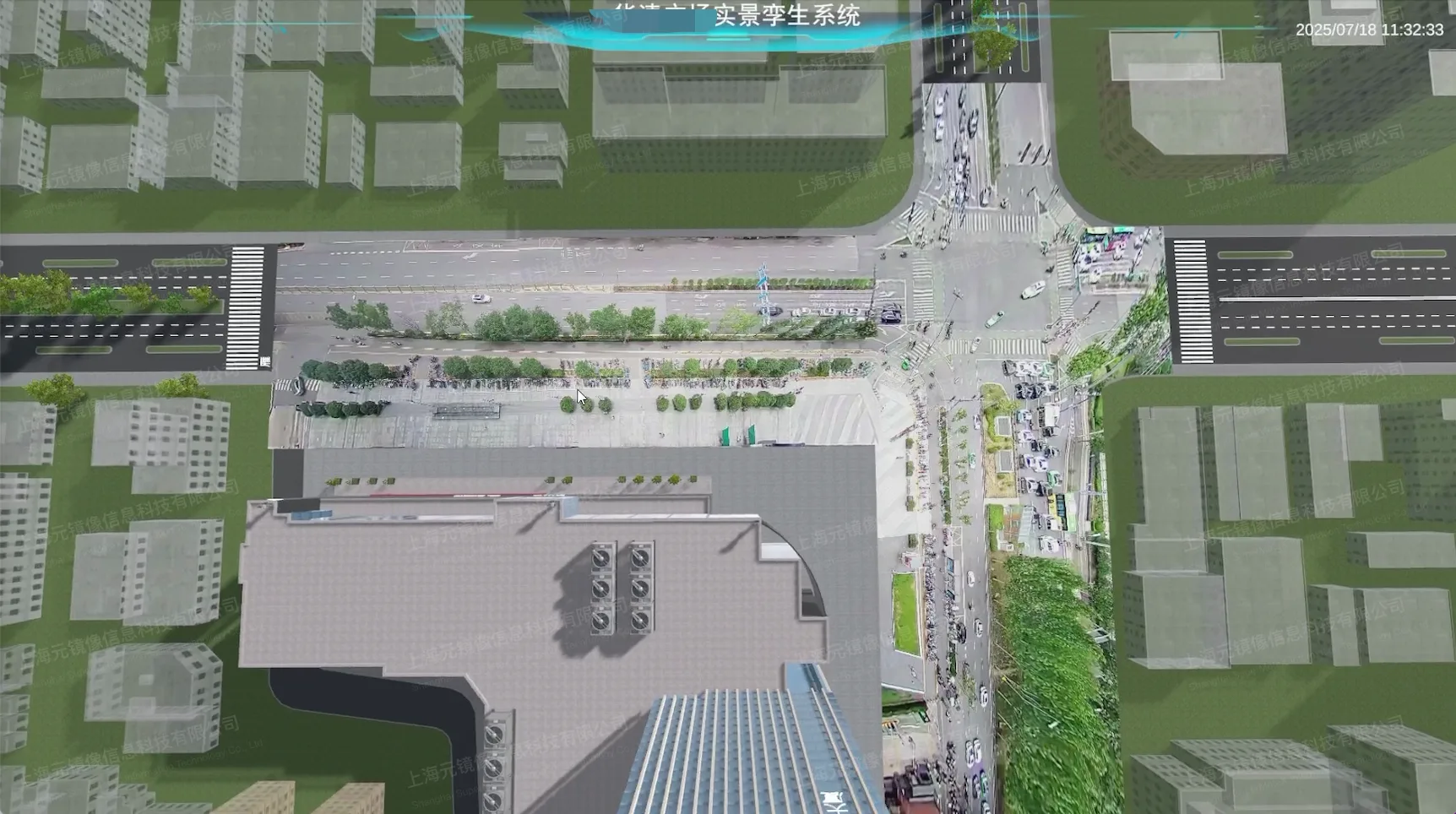
交通全景视频实景孪生
路口、路段多路摄像头画面分散,交通指挥中心难以同时掌握全局态势。实景孪生将视频流融合到交通三维场景中,一屏呈现全路段实时状况,点击三维地图任意路口即可查看对应摄像头实时画面,支持告警事件在三维空间精准定位。

船闸全景实景孪生
传统船闸监控依赖多路分屏画面,值班人员难以同时掌握闸室、闸首、闸尾和上下游的整体态势。实景孪生方案复用闸室两侧现有摄像头,将视频融合到船闸三维模型中,操作人员在三维界面内即可掌握全闸实时状态,点击任意位置可查看对应摄像头的实时画面。


六、如何选择:什么时候用数字孪生,什么时候用实景孪生?
| 需求场景 | 推荐方案 | 原因 |
|---|---|---|
| 规划设计阶段,需要仿真推演 | 传统数字孪生 | 需要精确的几何模型支撑设计验证 |
| 已有摄像头,需要快速上线可视化管控 | 实景孪生(视频孪生) | 复用现有基础设施,建设周期短 |
| 场景变化频繁(施工、布局调整) | 实景孪生 | 视频自动反映现实,无需重新建模 |
| 需要高精度展示效果 | 传统数字孪生 | 精细建模画质更佳 |
| 运营监控、实时告警、现场巡检 | 实景孪生 | 实时性强,能看到真实人员和设备状态 |
| 城市级大范围地理信息场景 | 两者结合(GIS + 视频融合) | Cesium 等引擎可同时承载地理数据和视频流 |
七、常见问题(FAQ)
实景孪生和数字孪生可以同时使用吗?
可以。常见做法是以轻量三维底座(Cesium/Three.js)承载 GIS 和 BIM 数据,同时将视频流实时融合进来,既保留三维空间的宏观感知,又通过视频流获得真实细节——这正是 SuperMetaX 实景孪生系统的典型部署方式。
"视频孪生"和"实景孪生"是同一个概念吗?
是的。两者是同一技术方向的不同叫法——都指将实时视频流与三维场景进行视频与三维融合的技术。SuperMetaX 在产品中同时使用这两个术语,指向同一套系统。
实景孪生需要多少摄像头?
没有固定要求。系统可以从少量关键位置摄像头开始,逐步扩展。已有 NVR/VMS 的项目可直接通过 RTSP 协议接入,无需更换设备。
实景孪生对三维建模精度有要求吗?
要求远低于传统数字孪生平台。实景三维更依赖视频流的质量和摄像头的覆盖范围,三维底座只需提供基本的空间拓扑关系,无需精细纹理建模。
总结
数字孪生适合规划、仿真和设计验证阶段;实景孪生(视频孪生)适合运营、监控和实时管控阶段。对于已有摄像头基础设施的项目,视频与三维融合是以最低成本实现数字孪生价值的最快路径。